
کلمه ژیروسکوپ از دو کلمه Gyro به معنای دوران و Scope به معنای نشان دادن تشکیل شده است لذا آنرا دوران نما می توان گفت که وظیفه خود یعنی نمایش دوران را بیان می کند.
ژیروسکوپها سنسورهایی می باشند که ما از آنها جهت به دست آوردن سرعت زاویه ای و موقعیت زاویه ای استفاده می کنیم با پردازش این اطلاعات می توان موقعیت کلی جسم را نیز بر اساس محاسبات به دست آورد ژیروسکوپ عضو اصلی سیستمهای هدایت اینرسی می باشد. سیستم هدایت اینرسی که در ناوبری اینرسی مورد استفاده قرار می گیرند سیستمهایی هستند که جهت مشخص کردن موقعیت یک متحرک مانند وضعیت هوایی یا کشتی با استفاده از متغییر های اینرسی آن مثل سرعت و شتاب که این امر از طریق اندازه گیری این کمیتها توسط حس کننده اینرسی انجام می گیرد. در حالت کلی سیستم هدایت اینرسی عبارت است از ژیروسکوپ ها و شتابسنجها که بر روی پایه ثبات اینرسی نصب می شوند.
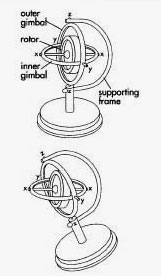
ژیروسکوپ مکانیکی
وظیفه اصلی ژیروسکوپ ها ایجاد یک دستگاه مختصات مرجع است و شتاب سنجها شتاب متحرک در امتداد چنین محورهایی اندازه می گیرند. که این شتاب می تواند نسبت به دستگاه مرجع اینرسی یا دستگاه مرجع دیگری مثل دستگاه متصل به زمین باشد.
در ادامه به شرح مبانی علمی سنسور پرداخته و محصولات موجود در بازار را بررسی می نماییم
2- مبانی علمی و فنی:
طبق اصل بقای اندازه حرکت زاویه ای هر جسم در حال چرخش متقارن سعی دارد جهت خود را همواره در فضا حفظ کند. لذا اگر یک جسم با وزن زیاد متقارن را با دور بالا بچرخانیم و اطراف آنرا با یاتاقان و بلبرینگ آزاد بگذاریم که نیروهای خارجی بر آن اعمال نشود. با چرخش قاب سیستم جهت چرخش جسم دوار تغییر نمیکند، لذا می توانیم بدین وسیله در اجسام متحرک جهت ثابتی داشته باشیم که وضعیت فعلی خود را در هر لحظه با آن مقایسه نماییم و لذا موقعیت زاویه ای و با محاسبه سرعت تغییر سرعت زاویه ای را به دست آوریم.
عضو اصلی ژیروسکوپ های مکانیکی، یک دستگاه دوار یا روتور است که معمولاَ با سرعت زیاد حول محور تقارن خود دوران میکند این سرعت از 3000 تا 300000 دور در دقیقه می باشد لذا در اثر اینرسی جرم دوار، اندازه حرکت ( ممنتوم ) نسبتا بزرگی ایجاد می گردد.
اگر یاتاقان بندی محور چرخش را در طوقه ای معلق تعبیه کنیم به نحوی که گشتاور خارجی به آن وارد نگردد لذا علیرغم تمام حرکتهای قاب، محور چرخش روتور همواره به جهت ثابتی استفاده میکند و موقعیت خود را در فضا حفظ میکند.
با این روش می توان جهت و یا محورهای ثابتی را برای وسیله نقلیه تعریف کرد که هر گونه حرکت زاویه ای نسبت به این محورها سنجیده شود.
1-2) خواص ژیروسکوپ
1-1-2) خاصیت صلبیت ژیروسکوپ:
ژیروسکوپ همانگونه که اشاره شد از خاصیت صلبیت استفاده می کند، طبق قانون دوم نیوتن که می گوید، مجموعه گشتاورهای خارجی وارد بر سیستم دوار حول یک نقطه مانند 0 برابر است با تغییرات زمانی اندازه حرکت زاویه ای سیستم حول همان نقطه، لذا چون اندازه حرکت زاویه ای سیستم برابر صفر است، مقدار و جهت بردار اندازه حرکت زاویه ای ژیروسکوپ در فضای اینرسی ثابت می ماند.
2-1-2) حرکت تقدیی:
چنانچه گشتاوری مانند M در راستایی غیر از راستای بردار ممنتوم زاویه ای به روتور اعمال شود، محور چرخش در راستای برداری عمود بر صفحه بردار گشتاور خارجی و ممنتوم زوایه ای دوران خواهد کرد. جهت دوران به این صورت است که بردار ممنتوم زوایه ای همواره با طی زاویه کوچکتر به طرف بردار گشتاور خارجی بچرخد، لذا وقتی چرخ دوچرخه را به صورت عمود همانطور که در فیلم مشخص است می چرخانیم نیروی وارد شده به آن طرف زمین موج چرخش دوچرخه دور خود می شود
2-2) انواع حرکتهای متحرک در فضا:
هر متحرک در فضا 6 درجه آزادی دارد که 3 حرکت خطی و 3 حرکت دورانی است برای مشخص نمودن حرکت دورانی متحرک در فضا از 3 محور عمود بر هم استفاده می شود که عبارتند از: محور رول یا محور طول، محور پیچ یا محور عرضی و محور یاو.
1-2-2) محور رول:
محور طولی یا محور جلو – عقب را محور رول می نامند و حرکت رول یعنی دوران متحرک حول محور طولی خودش.
2-2-2) محور پیچ:
محور عرضی یا جنبی را محور پیچ گویند. و حرکت پیچ دوران متحرک حول محور عرضی خودش است که محوری افقی است و عمود بر محور طولی می باشد.
3-2-2) محور یاو:
محور عمود بر دو محور یاو و پیچ است و دوران متحرک حول این محور قائم را دوران یاو گویند.
3-2) سیستم ناوبری اینرسی
این سیستم مجموعه ی است از 3 ژیروسکوپ یک درجه آزادی و یا 2 ژیروسکوپ دو درجه آزادی و 3 شتاب سنج که جهت یجاد محور مختصات ینرسی و بدست آوردن سرعت و شتاب زاویه ی استفاده می شود. نمی کلی و بلوک دیاگرام آن در شکل هی پیین موجود است.
4-2) انواع محرکهای روتور ژیروسکوپ
1-4-2) موتور الکتریکی:
در ژیروسکوپ ها معمولا از موتور الکتریکی استفاده می شود چرا که نیاز به سرعت بسیار بالا در ابعاد کوچک است، معمولا در این موتور برای ایجاد ممنتوم بیشتر، روتور خارج استاتور قرار می گیرد.
2-4-2) محرک نخی یا تسمه ای:
در موشکها و مواردی که در مدت زمان کوتاهی نیاز است استفاده می شود با کشیدن نخ یا تسمه روتور شروع به چرخش می نماید، این محرک در موشکهای برد کوتاه کاربرد دارد. از محرک نخی در موشک کبری و از محرک تسمه ای در موشک مالیوتکا استفاده می شود.
3-4-2) گاز تحت فشار
با دمیدن گاز در پرده های روتور، روتور با سرعت زیادی به چرخش در می آید، در موشک تاو استفاده شده است.
4-4-2) فنر
از فنر نیز جهت حرکت محرک استفاده می شود، در بعضی از موارد برای رسیدن به سرعت بسیار بالا در زمان کم از ترکیب فنر و موتور الکتریکی استفاده می شود.
5-4-2) چاشنیهای انفجاری
از چاشنیهای انفجاری نیز در داخل روتور استفاده می شود.
5-2) انواع ژیروسکوپ
به دلیل دقت و حساسیت کار معمولا از ژیروسکوپ با 3 درجه آزادی استفاده نمی شود از 3 ژیروسکوپ با یک درجه ازادی یا 2 ژیروسکوپ 2 درجه ازادی استفاده می شود.
1-5-2) ژیروسکوپ یک درجه آزادی
در این ژیروسکوپ روتور بجز حرکت حول محور چرخش تنها حول یک محور دیگر می تواند چرخش کند. در امتداد یک محور که طوقه داخلی باشد این حرکت امکان پذیر است، این ژیروسکوپ چرخش تنها در یک محور را حس می کند.
1-1-5-2) ژیروسکوپ سرعتی
در این ژیروسکوپ عامل برگشت طوقه مجموعه دوار به وضعیت اولیه یک عنصر الاستیک مانند فنر است
1-1-5-2) ژیروسکوپ انتگرالی
در این ژیروسکوپ عامل برگشت طوقه مجموعه دوار به وضعیت اولیه دمپینگ سیال با لزجت بالا است
2-5-2) ژیروسکوپ دو درجه آزادی
این ژیروسکوپ علاوه بر محور چرخش روتور دارای دو محور دوران دیگر نیز می باشد که توسط دو طوقه معلق درونی و بیرونی فراهم شده است. و حالت عادی محور چرخش و این دو محور بر هم عمودند. تکیه گاه طوقه داخلی در طوقه خارجی قراردارد. و طوقه خارجی نیز تکیه گاهی در بدنه ژیروسکوپ دارد و می تواند داخل آن حرکت دورانی انجام دهد.
6-2) انواع ژیروسکوپ از نظر اتصال
1-6-2) ژیروسکوپ متصل به بدنه
در این نوع ژیروسکوپ به بدنه متصل می گردد و با بدنه حرکت می کند
2-6-2) ژیروسکوپ با پیه ثابت
در این نوع ژیروسکوپ به بدنه متصل نمی گردد و بر روی یک صفحه که حرکتهی بدنه را معکوس شبیه سازی می کند نصب می گردد و لذا همیشه موقعیت ثابت دارد. بسیار گران قیمت و دقیق است.
3- تولید کنندگان داخلی و بازار ایران:
در ایران این تجهیزات تنها کاربرد نظامی داشته و تولید آن منحصر به شرکتهای صنایع نظامی می باشد
موسسه جهاد تحقیقات در این زمینه فعالیت می نماید
اطلاعات تماس این شرکت عبارت است از : دفتر مرکزی ( 8554426 و 8554427 )و بخش فروش (8726500 و 8726503)
در زمینه تولید ژیروسکوپ شرکت سویاب صنعت با این موسسه همکاری می نمید که اطلاعات تماس این شرکت عبارت است از : 026233621 و محل ین شرکت جاده قدیم کرج خیابان سولیران می باشد
متاسفانه طی تماسهی اینجانب با در موسسه مزبور اعلام نمودند جهت دریافت اطلاعات باید از یک سازمان دولتی معرفی نامه و درخواست رسمی ارسال شود که این موضوع در توان اینجانب نبود
4- کاربردهی متنوع :
در هر وسیله ی که بخواهیم مرجع مختصات ینرسی داشته باشیم و موقعیت و سرعت زاویه ی و شتاب زاویه ی را داشته باشیم
کاربرد در وسایل نقلیه هوایی, فضایی و دریایی، هواپیما, موشک, ماهواره,سفینه فضایی, کشتی, زیردریایی و … دارد.
از پدیده ژیروسکوپی در موارد زیر نیز در کابردهی جدید استفاده می شود
Robotics
در رباتهی پیچیده که حفظ تعادل کاری بسیار مشکل است مانند ربات دوپا که می خواهد راه برود و یا رباتهای انسان نما از این سنسور استفاده می شود با استفاده از لینک بالا یک نمونه از این کاربردها را مشاهده نمایید
Segway Scooter
این وسیله یک اسکوتر است که با جلو و یا عقب رفتن بدن فردی سوار آن است حرکت کرده و یا می یستد ین وسیله به صورت خودکار وضعیت خود را بالانس می کند و با استفاده از 5 سنسور ژیروسکوپ خود را بالانس نموده و از افتادن جلوگیری می نمید
Wheel Chair
در این ویلچر فرد معلول امکان بالا و پایین رفتن از پله یا بلندیها را داشته و تعادل صندلی به هم نمی خورد
Computer Pointing Devices
Racing Cars
Motor Bikes
Virtual Reality
Monorail Trains
Artificial horizons / autopilot
Automotive Yaw Rate Sensor
Global Positioning System ( GPS-INS, RTK ) Dead-reckoning
Fluxgate Compass compensation
In-Car Navigation Systems
Mobile dish antenna stabilized platform
Mobile camera platform stabilisation
Simulators
Telematics / Fleet-management
Remote Control Vehicles
Inertial / Dynamic measurement units
Drive safety recorder (blackbox for car/marine)
AGV, wheelchair
Marine Satellite Compasses
Angle Wrench
Agricultural Tractors
Physiotherapy / therapeutic Equipment
-3D input devices
5- سنسور هوشمند :
اگر هوشمند را به معنی انجام محاسبات داخلی جهت اریه نتیج دقیق تر و با خطی کمتر بدانیم عموم ین سنسور ها هوشمند هستند چرا که با محاسبات بسیار زیاد داخلی نتیجه بسیار مناسب اریه کرده و در بازه زمانی خود را با سیستم GPS تنظیم مجدد می نمیند
نظرات بسته شده است.